مقدمه
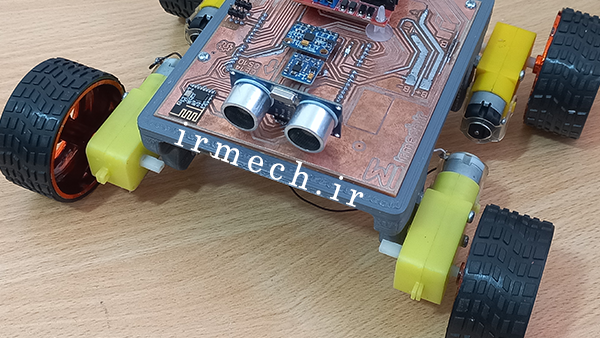
رباتهای چهار چرخ زمینی به دلیل قابلیتهای حرکتی بالا و تطبیقپذیری با محیطهای مختلف، کاربردهای گستردهای در صنعت، تحقیقات و آموزش دارند. یکی از مهمترین بخشهای ساخت این رباتها، طراحی و تولید برد الکترونیکی آنهاست. در این مقاله، مراحل ساخت برد الکترونیکی یک ربات چهار چرخ زمینی با استفاده از دستگاه CNC PCB را بررسی میکنیم.
۱. طراحی مدار الکترونیکی
قبل از ساخت برد، باید مدار الکترونیکی ربات طراحی شود. این مدار شامل بخشهای زیر است:
- کنترلکننده اصلی: معمولاً از میکروکنترلرهایی مانند Arduino، STM32 یا ESP32 استفاده میشود.
- درایور موتور: برای کنترل موتورهای DC یا سروو موتورها.
- سنسورها: مانند سنسورهای مادون قرمز، اولتراسونیک یا ژیروسکوپ.
- منبع تغذیه: شامل رگولاتورهای ولتاژ و باتری.
- ماژولهای ارتباطی: مانند بلوتوث یا وایفای برای کنترل از راه دور.
برای طراحی مدار از نرمافزارهایی مانند KiCad، Eagle یا Altium Designer استفاده میشود. پس از طراحی، فایلهای Gerber (برای لایههای برد) و فایلهای Drill (برای سوراخها) ایجاد میشوند.

۲. آمادهسازی دستگاه CNC PCB
دستگاه CNC PCB برای ساخت بردهای الکترونیکی استفاده میشود. مراحل آمادهسازی دستگاه عبارتند از:
- انتخاب مواد: بردهای مسی با ضخامت مناسب (معمولاً ۱.۶ میلیمتر) انتخاب میشوند.
- نصب ابزار: از فرزهای بسیار کوچک (معمولاً ۰.۲ تا ۰.۸ میلیمتر) برای حکاکی مسیرها و سوراخها استفاده میشود.
- تنظیمات نرمافزاری: فایلهای Gerber و Drill به نرمافزار کنترل دستگاه CNC بارگذاری میشوند.
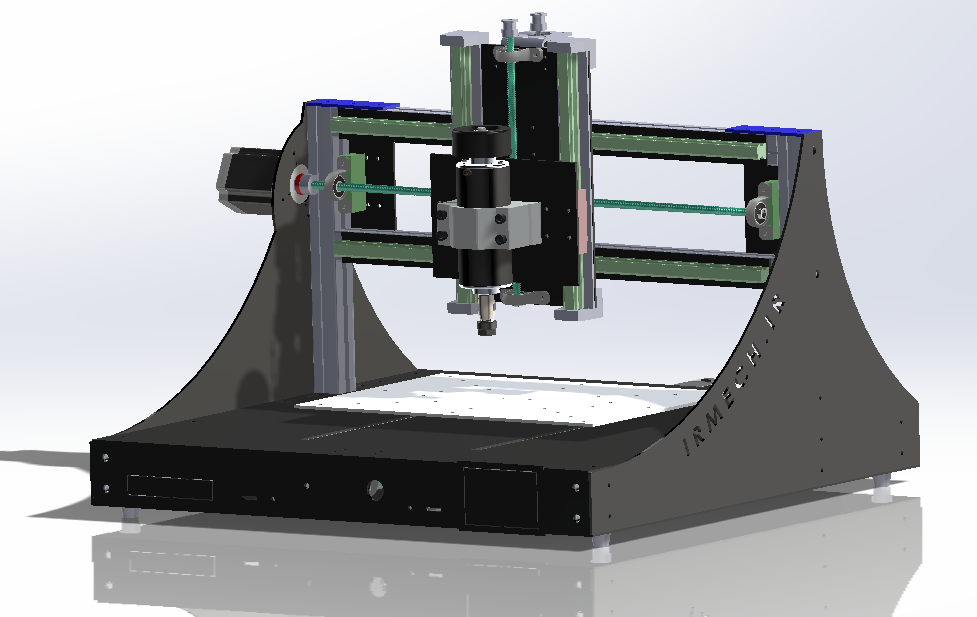
۳. مراحل ساخت برد با دستگاه CNC PCB
الف) حکاکی مسیرهای مسی
- دستگاه CNC با استفاده از فرز، مسیرهای مسی را بر اساس طرح طراحی شده حکاکی میکند.
- دقت دستگاه CNC در این مرحله بسیار مهم است، زیرا کوچکترین خطا میتواند باعث اتصال کوتاه یا قطعی در مدار شود.
ب) ایجاد سوراخها
- سوراخهای لازم برای نصب قطعات (مانند مقاومتها، خازنها و آیسیها) ایجاد میشوند.
- این سوراخها باید دقیقاً در محل تعیین شده در طراحی ایجاد شوند.
ج) برش برد
- پس از اتمام حکاکی و سوراخکاری، برد از صفحه اصلی برش داده میشود.
- این مرحله نیز باید با دقت بالا انجام شود تا ابعاد برد مطابق با طراحی باشد.

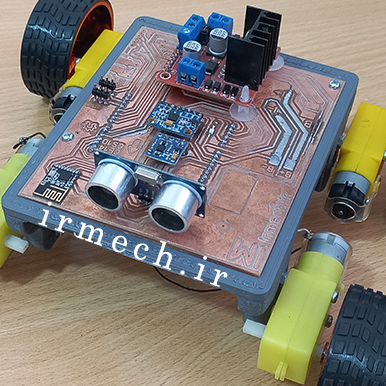
۴. مونتاژ قطعات
پس از ساخت برد، قطعات الکترونیکی بر روی آن نصب میشوند. مراحل مونتاژ عبارتند از:
- نصب قطعات SMD: قطعات سطحی مانند مقاومتها و خازنها با استفاده از هویه یا دستگاه Reflow نصب میشوند.
- نصب قطعات DIP: قطعاتی مانند آیسیها و کانکتورها که نیاز به سوراخ دارند، از طریق سوراخهای ایجاد شده نصب میشوند.
- اتصال سیمها: سیمهای لازم برای اتصال موتورها، سنسورها و منبع تغذیه به برد متصل میشوند.
۵. تست و عیبیابی
پس از مونتاژ، برد الکترونیکی باید تست شود تا از عملکرد صحیح آن اطمینان حاصل شود. مراحل تست عبارتند از:
- بررسی اتصالات: با استفاده از مولتیمتر، اتصالات کوتاه و قطعی بررسی میشوند.
- تست عملکرد: مدار با منبع تغذیه روشن میشود و عملکرد بخشهای مختلف (مانند موتورها و سنسورها) بررسی میشود.
- رفع خطاها: در صورت وجود مشکل، عیبیابی و رفع خطا انجام میشود.
۶. نصب برد روی ربات
پس از اطمینان از عملکرد صحیح برد، آن را روی شاسی ربات نصب میکنیم. مراحل نصب عبارتند از:
- اتصال موتورها: موتورهای چرخها به درایور موتور روی برد متصل میشوند.
- نصب سنسورها: سنسورها در محلهای تعیین شده نصب و به برد متصل میشوند.
- اتصال منبع تغذیه: باتری یا منبع تغذیه به برد متصل میشود.
۷. برنامهنویسی و کنترل ربات
در نهایت، میکروکنترلر روی برد برنامهنویسی میشود تا ربات بتواند وظایف خود را انجام دهد. این برنامهنویسی میتواند شامل موارد زیر باشد:
- کنترل حرکتی: حرکت ربات به جلو، عقب، چپ و راست.
- پردازش دادههای سنسور: استفاده از دادههای سنسورها برای تصمیمگیری.
- ارتباط با کاربر: کنترل ربات از طریق بلوتوث یا وایفای.
نتیجهگیری
ساخت برد الکترونیکی یک ربات چهار چرخ زمینی با استفاده از دستگاه CNC PCB، فرآیندی دقیق و تخصصی است که نیاز به طراحی دقیق، ساخت با دقت بالا و تست کامل دارد. با استفاده از این فناوری، میتوان بردهای الکترونیکی با کیفیت بالا و عملکرد قابل اطمینان تولید کرد. این بردها نقش کلیدی در عملکرد رباتها ایفا میکنند و امکان ساخت رباتهای پیشرفته و هوشمند را فراهم میآورند.